アルファモデル F86セイバー

ダクトユニット:アルファEDF60/15 (60/25に変更)
モーター:BLK24-47L(リトルベランカ)4700Kv
ESC:ハイペリオン 35A S-BEC
バッテリー:サンダーパワー 2100mah3セル
アルファモデルの電動ダクト機です。
アルファモデルの電動ダクト機は以前フッケバインを飛ばしていました。独自の構造ですがしっかりと良く飛ぶ機体でした。
そのメーカーがF-86を開発したのをホビーロビーで紹介され、日本に入ってくるのを楽しみにしていました。
当初、キットのまま飛ばそうと思っていたのですが、同クラスの電動ダクト機が他メーカーからも豊富に出てくる様になり、発泡機で胴体着陸の必要があるため草地の飛行場所でのフライトが難しくなったりした事もあって未製作のままでした。
それが・・
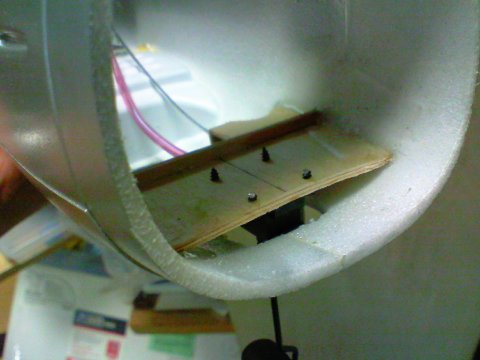
この機体機首部分のインテークダクトと胴体下面の間に少しだけ空間があります。
実機のF86は前輪が90度曲がって水平に収まるのですが、このサイズの機体ではそういう細工はかなり難しいです。
幸いなことにクラフトるうむなどから発売されている タイガーシャーク用のエア式引き込み脚ユニット(台湾のGAUI製)を模型店で見つけました。
長い間模型店に在ったのですが、ふとこれならリンケージの取り回しに難儀することもなくしかも薄型なのでノーズに入るのではと思い作業を始めました。
脚柱は2ミリですが、元のタイガーシャークがほぼ同じクラスの機体ですので、問題はないと思います。
インテークダクトを仮組しながら前輪の土台となる板を1.5ミリベニヤから切り出し、現物あわせで角度を確認しながら接着します。
引き込み脚ユニットの動作角度が90度なので、実機の様に前輪が少し前に出た感じは出ませんが、引き込んだ状態でタイヤが下面から出ない位置を確認しながら前輪を決めて行きます。
この引き込み脚ユニットは、加圧されたときだけ脚が引き込み、圧が無くなればスプリングで脚が降りた状態で固定されます。従って作業中はユニットを分解しピストンユニットを外しておきます。
(注射器で試しに加圧してみましたが、簡単には動作しませんでした)(安全といえば安全)


切ったり貼ったりの試行錯誤でなんとか収まりました。この形がわかっていれば、最初からカットする部分は最小限で済みます。ステアリングは外径1.5ミリのノイズレスパイプの中に0.5ミリのピアノ線を通しています。(先端はセット付属のピアノ線を銅線で巻いてハンダ付けし、付属のクレビスを付けています)
発泡素材とベニヤ板は30分硬化のエポキシを使っていますが、補助のためマイクログラスを発泡用瞬間で貼っています。ウレタン系接着剤(ゴリラグルー)があれば便利かもしれません。
と ここまで作業終えて写真も記録してページ作成していたら
アルファのHPにアルファモデルの引き込み脚ユニットを装備したF-86が出てました。
かっこええ (⌒∞⌒)
どうやってリンケージしてるんだろ?と思いますが、ラダーは追加してステアリングは無し。(真っ直ぐ走らせて補正はラダーならタキシングで手元まで帰そうと思わなければこの方法も正解 シンプルに超した事はありません)
ノーズの配置もほぼ同じでした。
京商のGPダクトのセーバーで地上姿勢が前下がりだと離陸が少し難しくなるという話もかつてありましたが、この機体は実機通りの前下がり姿勢です。この方がリアル。
飛びはアルファのHPでF-86のページの動画サンプルでみれます。 いい 絶対いい(⌒∞⌒)
頑張って作りましょう。
ノーズ周りのカバーを足せば、インテーク前側をノーズでネジ止めにする、ラダーを追加する、メカプレートを接着する。という作業で一段落つきます。
コクピット内部の狭いスペースに、バッテリー・ESC・受信機・サーボ3つ・エアタンク これが全部入るかが大問題です。
フッケバインは胴体が楕円だったので余分なスペースがけっこうありましたが、F-86はかなり厳しいです。
主翼はエルロンを2サーボ駆動。(本来のサーボ位置はタイヤ収納部と干渉)主脚の空気パイプはカプラーを経由しますので、主翼取り外しはそのまま可能です。
このカプラー、チューブ類を販売してくれるサイトで見つけた物とロバートの物はほぼ同じ物でした。(チューブはロバートの物の方が割安かも)
タンクへの加圧は逆止弁を使いますが、接続部にカプラーを使うか自転車のバルブを使ってそのまま機体に組み込むか方法はいろいろありそうです。
飛行中に2.3回出入りできればいいので、できるだけシンプルに済ませます。

ラダーサーボは散々頭ひねって結局この位置。ダクトユニット前のガイドの隙間にぎりぎり入ります。前輪のステアリングもワイヤーをU字にターンさせずS字で胴体側面をはわせてここに持ってきます。
ラダーサーボとエレベーターサーボをこちら側に並べると、反対側にぎりぎりエアタンクが入ります。バルブ制御のサーボはエレベーターサーボの前になんとか入りそうです。
スペースはかなり厳しいです。ESCはダクトを固定する胴枠より後ろに載せる事にしました。(ここはテールの負圧で空気が流れます)
最悪エアタンクを一回り小さな物で作り替えですが、なんとななるようなならないようなです。

ラダーはラインに沿って一度カットしヒンジを入れて最接着です。ラダー先端は作業中に少し曲がったため、極薄航空ベニヤを瞬間で角に挟み込んで補強。
垂直尾翼もラダーも左右の接着が完全ではなかったので、瞬間で再度接着です。
エルロンは1サーボでもいいのかもしれません。
今回使用する小さなエア式引き込み脚ユニットには加圧用のエア注入バルブなどは付属していません。タンクとの間に逆止弁を付けて使いますが、その先はありませんので米式バルブに準じたアダプターをアルミ丸棒から作り、自転車用の高圧ハンドポンプで空気を入れる事にしました。
ポンプと逆止弁の間は毎回チューブを挿したり抜いたりでもかまわないのですが、ロバートのカプラーを使うことにしました。
このカプラー、国内の空気用チューブ類を取り扱っている所でも同じ物が入手できます。
チューブ類は付属の黄色い物を使わず、ロバートの物で統一しました。
試しにノーズだけタンクとバルブつないで実験してみたところ、80PSI位入れておくとぴょこんぴょこんという感じで軽快に動作します。
収納時にスプリングで急激に出るかと思いましたが、シリンダーのエアが気持ちダンパー効果を生んで良い感じです。
付属タンクで3ユニット動作だと80から90PSI入れて3回くらい出し入れが無難な感じです。胴体内が狭いため小さなタンクを製作しようかとも思っていましたが、容量はこのままの方が良い様です。
圧力が下がってくると完全に引き込まなくなり、やがて出たままで固定されるので安全といえば安全です。
ダクトは以前フッケバインで使っていたHacker B22-Sを使ったものが手元にあったのですが、リトルベランカさんから発売されている黒いモーターを使いました。
インペラはそのままだとアウターケースに若干接触しますので、様子を見ながらアウターの内壁にサンドペーパーを当ててインペラを回しながら当たりを見ていきます。
バランス取りは少し苦労しましたが(モーターに付属している専用ハブのシャフト穴の精度が少し悪い)インペラのブレードにセロテープを貼っていくより、スピンナーを少しずつずらせてゆくとフルパワーで芯の出るポイントがありました。
ESCもなんとか排気ガイドと胴体の隙間に入りましたので、ダクトを固定し、胴体の作業は主翼ができるまで一段落。

ノーズは胴体側へ1ミリベニヤを数カ所埋め込み、タッピングビスで固定です。鯉のぼりみたいな巨大なインテークは仕方在りません。
主翼の作業に入ります。

ノーズに合わせて主脚の長さを決めましたので、脚ユニットのマウントを作っていきます。
発泡のモナカ主翼ですので、一部に1ミリベニヤのリブを入れ(スパーに接着します)マウント部材を組んで行きます。
エルロンサーボは1サーボで飛行させているビデオを見ても特に問題は無かったようなので、ニュートラル精度の高いサーボ1個で済ませる事にしました。
ここまで作業進んで、再びアルファモデルのHPをのぞいてみるとF-86のページに引き込み脚改装の画像説明が詳細に出ていました。
主翼スパーの前に引き込み脚サーボを搭載し、0.8ミリピアノ線でメインとノーズを動かしています。さすがに本家だけあって空間をうまく利用してます。
メインは胴体のセンターに対して90度で付いています。主脚位置は実機より少し前。
とはいってもうちのは今更変更できませんのでこのままで行くのであります。
アルファの作例は主脚マウントの強度をスパーに頼らず後縁側に3ミリカーボンロッドを貫通させていました。
飛行ビデオから推測されたように前輪のステアリングは無し、ラダーは追加でした。ラダーサーボ追加に伴い、サーボベッドをベニヤで製作し、そこから前のメカ室底板は省略されて、インテークダクト上面に3ミリバルサを貼ってそのままバッテリーマウントにしているようです。
これで大丈夫なら エアタンクはメカ室底板くりぬいてインテークダクトに載せてもいいかもしれません。
もう一機買ってアルファの方法で引き込み脚にする方が無難かも。ただし引き込み脚サーボ1個で動かして、インテークダクトの下に隠れてしまうため、運搬中の主翼の分離はちょっと難しくなりそうです。

主翼を接合し、脚の収納部をあけていきます。
元の色は田宮のプラ用スプレーのアルミシルバーでほぼ同じに仕上がりました。
脚のピアノ線は90度に曲げず、真鍮でアダプターを作りました。2ミリのイモネジと永久固着のロックタイトを併用して固定します。軽量な機体なのでこれで十分でしょう。
脚の格納ドアも可動なら面白いのですが、このサイズでは別個に動作させるのも無駄なので、間違いなく出入りする事を優先します。
脚位置はアルファのHPの機体の様にもう少し前に出した方が離陸が容易になりますが、けがき線に合わせるとこうなります。
舗装の滑走路なら問題無いでしょう。離陸に支障がある飛行場所なら手投げで上げて胴体着陸回収で良いです。
主翼中央部の後縁はこのままでは少し心許ないので、2ミリバルサで補強しておきました。
主翼が決まったら胴体に取り付けて水平尾翼の位置出しができます。
草地で飛ばすのが前提なら、軽量に仕上げて増槽タンク(タイヤ付き)付けてラダー追加しておけばいいのかもしれません。

エルロンサーボはベッド作ってやって0.5ミリのアルミで帯を作ってタッピング止めです。サーボホーンは図面の設定では9ミリですが、そこまでストロークは要らないのでJRのミニサーボに使われている小さな十字ホーンの8ミリの物を使いました。
サーボはハイテックのHS-55も良いのですが、JRのミニサーボを使いました。動作は少し遅いのですが止まり精度はメーカー品だけあります。
(ホビーロビーの作例ではHS-55だったのでどちらでも良いです)

エレベーターサーボも同様に固定しました。
エアタンクの位置を散々悩んだのですが、結局ここ。枕かませてバンドで締めてます。
バッテリートレーの位置は元のベッドをカットして一段下げました。アルファの作例は吸気ダクトにベッド(3ミリバルサ)を直接貼って載せています。
受信機はベッドの一番前にきます。ESCやサーボからは吸気ダクトの隙間を延長ハーネス使って通しています。
なんとか収まりそうです。

なんとか形になりました。 窓枠がちょっと太いのはアルファのこの機体では仕方ないです。
コクピットは一度分解して、塗装後にパイロット乗せて組み直しです。航空自衛隊カラーで仕上げる予定です。銃口パネルのステンレスだけメタルカラーで塗っておきました。

メカ室は散々やり直してやっと収まりよくなりました。
脚のバルブのサーボは当初金属ギヤを使った薄型のマイクロサーボを使っていましたがトルク不足だったようでHS-55に変更しました。バルブの搭載方向をやり直してパイプの取り回しも良くなりました。
脚は3つ全部動かすには100PSI以上加圧する必要がありましたが、2回程度は安全に出し入れできるようです。
この状態で一応飛行テストはできるようになりましたが、細かい塗装済ませてからにしようと思います。タキシングのテストは問題ありませんでした。
脚がついているのはやはり良いです。

塗色は元のアルミシルバーを基本に航空自衛隊の塗色にしました。今回は機体番号とコーションマーク以外(ラインと日の丸)は塗装で仕上げました。発泡生地にサークルカッターを挿すわけにはいかないので、基準点に極薄のベニヤを仮固定してマスキングテープを切り抜いています。
この時期の市販電動ダクト機ではどうしてもインテークが拡大され(排気口も大きく)実機の外観からはかなり違うのですが、雰囲気は良く出ています。
機体重量はまだ重い部類ではないので、路面によっては脚を納めたまま降ろす事も無難かもしれません。

パイロットがスケールサイズではやや大きめですが、ご愛敬であります。オリジナルはヘルメットに別にゴーグルかけてますが、埋めて削ってゴーグル一体型に作り替えました。
日の丸の筆塗りで、小さな頃に父親から腕を持って筆塗りの手の動かし方教えてもらったのを思い出してました。
このサイズでエア式引き込み脚の電動ダクト機が飛ぶのも時代を感じます。
2008/06/23
テストフライト
雨の合間に地元の狭いエリアでちょっとだけテストしてみました。
路面は荒れた場所しか使えなかったのですが、土埃を巻き上げながらひょこひょこ走っていった機体は何事もなく離陸しました。
トリムを合わせてラインに乗せようとしますが、エルロンがちょっとだけ残るような残らないような、大した問題ではありませんが、エルロン2サーボにしたほうが無難だったかもしれません。
標準舵角よりエルロンはかなり小さくしていたのですが、これでも十分なロールレート。キットの舵角だとかなり高速に回ります。
強い後退翼でしかも発泡機ではありますが、急旋回でも変な癖は全く感じられません。
ただ・・ 遅い。 発泡レアベアよりは速いのですが、パークジェット並の速度でゆったり(実際には手元にくるとそこそこ走ってますが)飛ぶように感じられます。
ファンを現行の青いインペラの物ではなく、以前の低ピッチのインペラの物をそのまま使っていますので、このモーターには負荷が軽すぎるのかもしれません。
小さなA-4のフライトに目が慣れたせいでしょうか。(見た目HETのF-18より遙かに高速です)欲が出るものではあります。
ところが、フライト中に機体から灰色の破片が・・・・
高速なロールでバッテリーが少し動いてしまい、キャノピーが離脱してしまったようです。落ちていく破片ばかり見てるわけにもいかないので、機体は緊急着陸。
脚納めたまま草地に強めのランディングで回収でした。
ノーズをちょっと痛めましたが、直ぐに修復できる程度。キャノピーの捜索をかなりがんばったのですが見つからず撤収。
ラインにちょっと気に入らない部分があったので、型作って作り直します。
滑空性能も問題なく、非常に遊べる機体に思えました。(実は地元エリアでは脚が無い方が安全に飛ばせます)
仕事が一段落したらリベンジであります。
2008/06/25

後日、キャノピーを塩ビで作り直し。(形状はこのほうが似てるといえば似てます) 前側をピアノ線のノックピン、後ろをマジックテープで固定する方法に変更しました。
コクピットフロアは未製作、パイロット不在のままです。
修理ついでにダクトユニットを現行の青いインペラの物に交換しました。リトルベランカのモーターにはこれが合っているようです。
交換作業で、ダクトのアウターと取り付けフランジの接着不良がありましたので、隙間にマイクロバルーンを詰め低粘度瞬間で固めておきました。
再テストでは十分なパワーで飛び、速度も満足できるものでした。初回テストでのロール軸ふらつきもあまり感じられず、良い感触です。
背面時のダウンが少し大きめですが、設定で問題は解決できます。
背中見せながらの眼前パスは良い雰囲気でした。
このサイズでエア駆動の引き込み脚というのは少し無理があるようにも感じますが、実験としては面白く思えます。
この飛行場所は全面舗装滑走路に安全地帯は砂利という胴体着陸機では厳しい場所なのですが、脚付きだと楽しめます。
一段落であります。
2008/07/10
Koubou SIrokuma