ModelSport Sea Knight CH-46


MS社が発売したタンデムローターの小型電動ヘリです。
CPホーネットのヘッドを使ったものです。海外ではこのCH46の前にドラゴンフライという機体が発売され、ベルトドライブで面白い構造でしたが、MS版の方はAXIのアウトランナーを使いベベルギヤによるシャフトドライブになっています。
発表から発売までかなり時間がかかったのですが、2004年の春に発売されサークロスさんで輸入された物が届きました。しばらく他の用事で製作ができなかったのですが、夏になってようやく製作開始しました。
モーター:MS純正CH46用
コントローラー:CC フェニックス25(非ガバナーモード)> JETI SPIN33(アウトランナー ガスカーブモード)
バッテリー:ハイペリオン1800mah 3セル
サーボ:WAYPOINT 060 *6個
受信機:Berg 6ch
ジャイロ:双葉GY240 *2 (エレベーター ラダー)
双葉の146ip(PCM)ではノイズによるものかミキサーとの干渉か、誤動作を起こすことがありました。信用できるFM受信機を使っています。
Bergもしくはシュルツェ(アルファ840)の社外高信頼FM受信機か双葉・JR・三和の小型のFM受信機の使用をお勧めします。
一部の社外デュアルコンバージョン受信機にはノイズによる瞬間的なぴくつきの多いもの(ノイズフィルターの低品質なもの)があります。飛行機などで普通に使うには問題ありませんが、電動ヘリには使用を避けた方が良い物もあります。
アジアメーカーのOEMの格安超小型6CH受信機はいろいろありますが、電動ヘリにはあまりお勧めしません。アンテナがしっかり張れる飛行機なら問題が無くても取り回しに制限があったりノイズの影響を受けやすい電動ヘリではトラブルを招くだけです。
製作
キットに含まれるパーツ点数は意外に多くはありません。但しホーネットの様に樹脂成形パーツで大半ができているわけでは無いのでフレームの組み立てには常識的な修正が必要です。(良い機体を作ろうと思えば当たり前の事なのですが最近はそんな事しなくてもとりあえず飛ぶ機体が増えましたので、この機体の場合には小さなヤスリで細かく修正した方が良いです)樹脂パーツのバリなどの修正もします。
機体の製作自体はホーネットを組んだ事がある方ならそれほどややこしいものではありませんが、多少の調整は必要となります。
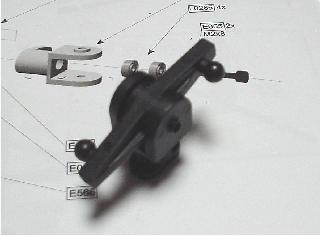
スタビライザーのセンターシーソーには両側からベアリングが付きます。キットに含まれる内径2ミリのベアリングにはブレードグリップに使われる厚さの厚い物とスタビライザーに使われる薄いものがありますので確認は必要です。
シーソー部のベアリングが入る箇所は予め入り口のバリを少し落としておきます。ベアリングを入れる前にシーソーを清掃しておいた方が良いでしょう。
センターシーソーはシーソーのハブの両側から先端が2ミリに加工されたイモネジで両側から締め込みますが、このイモネジはハブに対して垂直にねじ込まなければなりません。予め3ミリのタップで軽くネジを(タップの先がちょっとくい込む程度)切ってやっても良いかもしれません。(この方がイモネジの締め込みによる根元の盛り上がりがありません)
イモネジを両側から締め込みますが、締め込んだ段階でハブの両面が平行になり、ハブとシーソーとのクリアランスが同じになるように根気よく調整します。
正確に調整できればシーソーはごく軽く動くはずです。多少渋くても飛ばしてる間に慣れるという発想はこのクラスの機体には論外です。
このシーソーを2組組み立てますが、もう一方はシーソーが裏返し(リンク玉の位置が逆)にならないといけません。
左回転側のローターヘッド(前側)はスタビシーソーとブレードグリップは説明書の絵と逆向き(グリップのビスは裏側から締める)(ビス穴は片側が大きくビスが素通りし、反対側はネジが効くようになっています。ビスが通る側からビスを通し締め込みます。従って前側ブレードグリップはビスを下側から通して締めます)に組まなければいけません。
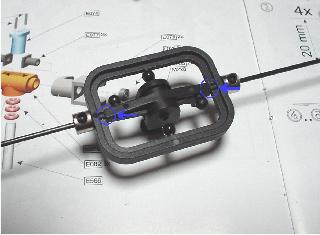
スタビライザーを組んで行きます。青い○の箇所が当たっているとスタビライザーの動きに支障が出ますので、組み立て前にコントロールリンクの内側の成形線を修正し、スタビライザーバーを通した段階で何の引っかかりも無くスムースに動くようになるまでシーソーの当たり面を細かいヤスリで研磨し調整します。
これをしておかないと舵の入力に変な癖が出たり振動の原因になります。この段階で注油は必要ありません。グリスを塗布すると埃や毛くずを巻き込み飛ばしている間に動きが渋くなります。どうしてもという場合にはテフロン系のスプレーを吹き(ボールリンクには吹かなくて良いです)余分な油脂は拭き取っておきます。
ヘッドやドライブシャフトの組み立てで1ミリのピンを多用しますが、このピンを打ち込むときピンの切断面が荒れている事がありますので、打ち込み前にピンの先端を研磨し角を取っておきます。ピンが無くなった場合には似たような長さの1ミリピアノ線で代用できます。
メインフレームにFRPの側板を2ミリビスで取り付けて行きますが、ベアリングホルダーによっては後の作業で位置調整の必要な物もありますので、前後のマストを保持するホルダーを基準に締め込んで行きます。側板の平行度は前後左右から根気よく調整します。特に中央部の側板は主脚の取り付けにも影響しますので、安易に締めてしまわないよう正確に組み立てます。
後ろのローターを駆動するドライブシャフトはモーターとユニバーサルジョイントで継がりますが、このジョイントはシャフトの入る穴をきっちり清掃し脱脂しておく必要があります。説明書では瞬間でもエポキシでも良いとありますが、シャフトをペーパーで荒らしておいて15分エポキシで接着する方が確実と思います。接着時にジョイント内部の空気がしっかり抜けないと硬化前にジョイントが押されてしまいますので注意が必要です。
私は当初瞬間で固定していましたが浸透が十分では無く滑りました。
ギヤのクリアランスは前ローター側のギヤを取り付けた後にモーターの取り付け位置を調整し合わせます。FRP側板がモーター取り付け面に接触していると正確な調整ができませんので、モーターに触れる端面をヤスリで修正しておいた方が良いでしょう。
モーターの位置が決まったら後部ローターのギヤを前部ローターを90度ずれた位置で固定します。ギヤを固定したらベベルのかみ合わせを調整します。
ギヤのかみ合わせが決まったら途中2カ所のシャフトガイドの位置を丁寧に合わせます。一度後部ローターのギヤを抜き、ドライブシャフトが真っ直ぐに抵抗無くモーターのジョイントに入るようにしなければいけません。カーボンシャフトですので多少のずれは吸収しますが、芯が出ていないとジョイントやベアリングに余分な力が加わりロスとなります。
納得行くまで調整は必要に思います。
サーボは6つともWaypointの060を使いました。一部メーカーには単にモーターの消費電流が多いだけのサーボもありますが、060やGWSのPICOでは問題は無いと思います。CCPMで2組が一度に動きますので大食いのサーボでは負担が大きいでしょう。
サーボマウントは060では一部穴を修正する必要がありました。側板がサーボリードの取り出し部と接触する場合はこれも対策します。
サーボホーンはシングルローターのスワッシュモード機の様に送信機側ではホーンのセンター合わせができませんので(エルロン・エレベーター・ラダーのサブトリムで合わせられなくはないですが)全トリムニュートラル、スロットル50%ポジションでホーンが水平になる位置でホーンを合わせます。
ホーンの長さは双葉のFF9を使った場合で10ミリで良い様でした。
サーボの取り付けピッチに制限がありますが、可能ならばGWSのピコSTD・双葉ならば3108またはMS-1(コネクターの加工が必要ですが、ミキサーまで延長コードが必須となりますので問題ありません)、JRならば3108と同クラスのサーボが安心して使えると思います。
(私はウェイポイントの060に合わせて加工してしまったためこれらへの載せ替えが困難なためそのまま使っています)
9グラムサーボは取り付けが困難と思われます。
また背の高いサーボもボディ装着時に干渉します。
受信機用電源はモーターコントローラーのBEC回路を使っても純正アンプでは問題無い様子ですが、私はコントローラーにフェニックス25を使いBECをキャンセルして別付けのS-BECを使用しました。
マイクロサーボとはいえリチウムポリマー3セルで6個が同時に動きますし圧電振動ジャイロを2つ使いますので、できれば内蔵BECを使わない方が安心と思います。
バッテリーはポリクエストの1500の3セルを使いました。私の設定では最大負荷でも10A以下でしたので問題は無いと思います。中央部側板へマジックテープで固定しています。
現在はJETIのSPIN33のスイッチングレギュレータータイプのコントローラーを使っています。30Aクラスでは多極のアウトランナーにはこれが相性が良いようです。また外付けBECの必要がなくなるため配線が若干シンプルにできます。バッテリーはハイペリオンの1800の3セルを今は使っています。
前後のヘッドのコントロールは専用のミキサーを使います。ロール軸ヨー軸の制御は普及しているタンデムローター機と同じですが、ピッチ軸に関しては前後スワッシュの前傾後傾に加え若干のピッチ制御も入っています。
説明書には空きチャンネルで使うコネクターが指示してありますが、このチャンネルへの信号入力でピッチ軸でのピッチ制御を変更しますので、受信機はフルに6CH以上使える物が必要になります。
Bergの初期の5CH(1,2,3,4,6ch)の物や現行の5chか6chかどちらかを選択する物は使えません。
英文取説しか付属していませんが、良く読んで理解する必要があります。
受信機とミキシングボードの配線が解説図ではヨーロッパでの一般的な配列として書かれていますが、双葉とJRでは動作とチャンネルへの割り当てが少し違いますので、間違えない様にしっかり理解された後に結線されるほうが良いでしょう。
送信機は説明書に指示がありますが、ノーマルモード(非CCPMモード)で設定します。
肝心のピッチ軸の制御には私は双葉のGY240を使いました。7ch以上の受信機を使う場合には401で感度切り替えも可能な様ですが、240の通常モードでもゆっくり飛ばすには問題は今のところ無いような感じです。
ボディをかぶせてしまうとピッチ軸ジャイロの感度設定がジャイロ側では難しくなりますので、送信機からリモートで感度設定できるほうが調整は楽と思います。
コントローラーの設定はフェニックス25でアウトランナーのモーターを使うため、高速側のガバナーモードで使っています。手持ちテストではハードタイミングにしないと回転が不足する感じでしたが、実際にはそれほどの回転も必要ありませんので通常進角でも良さそうです。
ソフトスタートにしています。
ガバナーモードの必要も無いと思いますが、回転数上下による余分なトルク反応を避けたい意味もありますが、ピッチが加わったときの負荷の増大がシングルローター機とは比較になりませんので、最大ピッチは最小限に合わせていっています。
浮上はあっけないほど簡単でしたが・・・ 細かい調整はこれから煮詰める必要があります。
 。
。
2004/08/17
調整
何回かのテストをして、モーターコントローラーはガバナーモード(ハイ)で標準進角の制御周波数デフォルトで落ち着きました。
ホーネットの様な高速回転はしないのでこれで良いでしょう。メーカーのデモフライトのビデオを見ても同じ様な回転数でした。
トリム合わせは原則として機体側で合わせます。トラッキングを正確に合わせきっちりリンケージしておけばそんなに癖は出ないはずですが、多少は出ますのでピッチ軸のずれは前後ピッチの増減、ヨー軸のずれは前後スワッシュの傾きをロッドの長さで合わせます。ロール軸はそんなにずれないですが、ずれが大きいようならこれもスワッシュの左右傾斜で合わせます。
近年市販されているホーネットなどの300クラス電動ヘリからボイジャーEやエンジン60サイズ互換の電動ヘリまで、大半の機体はそのまま組んで調整すればパワフルなモーターを選ぶだけで3Dできて当然という設計になっています。以前の様に辛苦して調整を詰める必要はありません。
飛んで当たり前のヘリがほとんどです。
そういう機種でさえ基本的な事をマスターされていないと浮かない良く飛ばないと言われる事があります。これは機体の問題ではなく、調整の方向が間違っているからです。
CH-46はそういう意味ではもっと複雑な調整を要求します。ホーネットなども安価な事から簡単な入門ヘリであるかの如く言われる場合が多いのですが、普通に飛ばしてループ・ロール・背面するだけなら50クラスヘリの方がよほど簡単です。
安価=簡単 という意識は電動ヘリの場合一部の入門用ヘリをのぞいて捨ててしまわれた方が良いです。
CH-46はパーツ点数も割と少ない方だとは思うのですが、最低限ホーネットかホーネット2のヘッドを正確に組まれる技術があり(ピン打ってネジ締めただけではなく)構造を良く理解し、組み立てで安易な妥協をせず、じっくりと調整する事ができないと、ただの高価な飾りになります。
飾るには良いサイズですけど・・・ ヒロボーのバートルと同じ意識でチャレンジされる方が良いと思います。
ヘリコプターが飛ばせない(実際のフライト調整ができない)方には向きません。
ホバリングとゆっくりした動きなら、ある程度の技術のある方なら調整をひたすらがんばれば必ずできます。
重要
ピッチング軸(前後)のホバリング調整は送信機のトリムで行ってはいけません。ホバリング時は前後のスワッシュプレートはマストに対してそれぞれ必ず水平になっている必要があります。ホバリング時に前へ動こうとする場合は前ローターのピッチを増やし後ローターのピッチを減らします。(後に行く場合はそれぞれ逆)
気象条件などにより送信機で多少のエレベータートリム調整をすることはありますが、前後ピッチ調整がしっかりできていないと変な癖が出るだけです。
前進飛行で前側のローター回転面が水平より前に傾きますと、速度がある場合には頭から突っ込みます。上空飛行される場合は要注意です。
ホバリングモードと上空モード二つを使える場合には、マルチミキサーへの入力(5CHなどから)の信号をオフセットミキシング(もしくは通常のジャイロ感度設定チャンネル)でそれぞれのモードに合わせて使うことができます。
通常のシングルローターヘリでジャイロ感度を送信機の単独スイッチで切り替える事が習慣になっている方は、アイドルアップ1(上空モード)スイッチからオフセットミキシングをかけてやる方法もあります。
フライトモード毎にジャイロ感度を設定できる送信機の場合には通常のヨー軸ジャイロの感度調整chの信号をミキサーに入力すれば設定は容易と思われます。
3Dアクロや高速飛行をする機体ではありませんので、ヨー軸ジャイロの感度切り替えは必要無いと思います。
受信機側電源の容量にもよりますが、ヨー軸にGY401などの感度調整可能なヘディングロックジャイロを使うのも面白いかもしれません。
7CH以上の送信機を使う場合にはピッチ軸ジャイロの感度調整も可能ですが、ミキサーへの信号入力の方が優先します。
手で持って実験できますので、マルチミキサーへの入力はいろいろ調整されると意味がわかると思います。
基本的には前後スワッシュの前後への傾きに対する前後ピッチの変更量(スワッシュの傾斜によるコントロールと前後ローターの浮力差によるコントロールの割合の調整です)
これができないとタンデムローターヘリは前進飛行ができません。
キット付属の説明書にはミキサーからの黄色のコネクターを受信機の5chへフリーとして接続するようになっていますが、このフリーの意味は「放置」ではなく、ミキサーへのエレベーター制御調整の信号入力として機能します。
説明書を良く読むと(英文ですが)しっかりと書いてありますが、英語圏の方でもこの黄色ラインの意味がわからない事があるあくらいちょっと難解です。
この黄色ラインへの信号を変更する事で、エレベーター操作時のスワッシュ傾斜と前後ピッチの変更量の混合調整をします。
双葉の無線機の場合、5chへの信号がマイナスになればなるほどエレベーターダウン操舵時に前ローターのピッチが減り後ローターのピッチが増える量が増えます。
通常のホバリングモード(前進速度が低い場合)ではエレベーター操舵時にピッチ増減量が多い方が制御が容易になります。
上空飛行モードなどではスワッシュの動作をメインに操舵したほうが制御がしやすくなるように思われます。
私の機体ではホバリングモードで5chへ80%位(飛行調整で84%程度)のオフセットミキシングをかけています。これだと風などであおられた場合にも抑えが効きます。
前進飛行モードではこのマイナスオフセットをもう少し減らした方が良いのかもしれません。
双葉のFF9やT9Zや14MZならばオフセットミキシングの機能がありますからこれで設定できますが、5CHをスイッチで切り替え、サブトリムでのオフセットと5CHのATVで変更する事も不可能ではないと思われますが、フライトコンディションと連動させた方が操縦は容易になると思われます。
機械式ミキシング時代のヒロボーのバートルはエレベーターダウンの操舵をすると、前ピッチが下がり後ピッチが上がると同時に後のスワッシュが少し前傾するような機構となっていましたが、高速前進飛行での急激な頭下げの癖があったと聞きます。
エレベーターへのジャイロは現在GY240のノーマルモードで行っています。姿勢制御というよりは操舵のダンパーとしての機能の方が大きいかもしれません。
GY401を使えばノーマルモードとAVCS(ヘディングロック)モードの切り替えが可能ですが、AVCSは飛行中の前後の傾斜角を維持する目的では有効と思えますが、前進速度の制御には直接の影響が低くなります。
一定速度での前進飛行中に急激な頭下げを防止するという意味では効果が期待できるかもしれません。
ホバリング時には風に吹かれて頭上げを起こしエレベーターフルダウンでも元に戻せなくなることがあります。
ホバリングでのローター回転数が不足すると姿勢制御にも影響しますので調整が進むまでは要注意です。
ホーネットのローターヘッド2つ分が回転しますから無風状態では舵は落ち着いています。
ピッチ軸ジャイロはノーマルモード70%感度(GY240)のままでゆっくりした動きでは安定性も運動性も問題ありませんでした。ヨー軸ジャイロはシングルローターヘリと比べテールの止まりとは関係無いのですが、他の舵とバランスが合う動きに感度を合わせます。
エルロンの反応が初期は穏やかですのでそれに近い反応をする程度にヨー軸のジャイロを合わせた方が飛ばしやすいでしょう。
最大ピッチは希望する上昇力が維持できる範囲で最小にしておいた方がモーターの負担は軽いでしょう。
極数の多いアウトランナータイプのモーターを使っていますので、ガバナーモードの使用はあまりお勧めしません。
制御周波数の高いESCならば対応可能と思いますが、まともなピッチカーブ・スロットルカーブの設定ができれば安定したフライトは可能です。
特にタンデム機は負荷が大きいため、ホバリングから上では少し回転が上がるようにした方がモーターの発熱は少ないと思われます。
風が穏やかな状態では非常にどっしりした浮きを見せてくれます。運動性を高めたホーネットの様な操舵へのシャープな反応はありませんがゆっくり飛ぶにはこの方が良いでしょう。GY401の様な感度が送信機から設定できるジャイロならば高機動な設定もできるようですが、これは後の課題にしたいと思います。
飛行中のサーボを見ているとかなり細かくジャイロで動いていますので、受信機用レギュレーターは必須だと思います。
ボディ塗らねば・・・
2004/08/18 (2006/02/25加筆)
やっとボディ
上の日付みるともう半年以上経過してます。普段飛ばしているエリアで40メガ帯のトラブルが増えたため、エンジンヘリで使っている送信機を72メガに変更しました。CH-46の送信機もFF9からT9Zに変更しました。
T9Zの場合、フライトコンディションでの設定ができFF9より自由度が高いです。ガバナー設定も上に書いたノーマルモードで使う方法の他にホバリング用アイドルアップモードでホバリング用回転数でフラットに設定する事ができます。これをしておくとゆっくりしたクルージングをノーマルモードで行う場合に降下のためにピッチを抜いたときスロットルスティックが起動範囲に下がり回転が落ちてしまうことが防げます。
FF9でもPMXをうまくやってやると似たような設定ができますが、各コンディション毎にジャイロ感度設定(CH-46の場合にはピッチ軸制御)ができるのは調整が楽になります。
市販の社外軽量受信機の中にはFF9では問題なく使えてT9Zではトラブルが出る物もありますので注意は必要です。
で・・・ ボディを作り始めたのですが、前ローターのエルロンとピッチサーボおよび後ローターのサーボがボディに接触します。
フレームの内側にサーボの取り付け耳が付くようにして(後の左側サーボは構造上上側のネジ止めができないので片側だけネジ止めし他を半固定しました)組み直しました。
ボディのカットラインはほぼ合っていました。左右ボディのネジ止めが終わると結構しっかりしますが、製作中は少し柔らかいです。
左右の接合にはキットのマイナスビスは使わず2*4の六角ビスをタップ切った穴へ締めました。
塗装は随分悩んでいたのですが、結局ボディ裏側からポリカーボネード用スプレーでする事になりました。
ボディ組んで再度調整取り直しです。
2005/01/16
ボディ完成

本人も忘れかけた頃にやっとボディの塗装にとりかかり完成しました。スワッシュの左右側のサーボは最初からフレームパネル内側に付けた方がWAYPOINT060の場合には都合が良いみたいです。(このサーボたまにニュートラルずれるものがある ことがあるかもしれないのですけど、この機体の物は大丈夫でした)(途中で高さが低くなった060を使ってます)(GWS PICO-STDの方が信頼性は高いかもしれないです)
川崎純正塗色か全日空カラーか自衛隊の救難ヘリ塗装か随分迷いましたが、結局岩国で馴染みの航空自衛隊仕様で仕上げました。
細かいところはかなり違います。増装タンク無いとか、バブルウインドゥが無い(キットは二個入ってますが実機は四カ所)とか救難ホイストとサーチライトが無いとかありますが、気になれば追々追加します。
ボディ付くとかなり小さく見えます。ペコペコの素材ですが組むとしっかりします。アンテナはこちら側の胴体内側へテープで貼って取り回してます。
キーエンスのタンデムフライで難儀していた頃に、ボディはこの塗装で仕上げようと目論んでましたが、このサイズでもけっこう手間でした。
近くで見ると赤い部分の刷毛むらがありますが、画像にしてしまえばわかりません。
やっと完成です。
ミキサーの上空用設定とかまだ難題はありますが、遊覧飛行なら問題ないです。
2005/01/17
地道に調整を続けています。送信機をT9Zにしたのですが、スロットルの動作範囲をハイ・ロー側両方を95%に各フライトモードで設定しました。
ホバリング時にフェニックス25のガバナーモード(H)で送信機側のスロットルカーブで90%程度がホバリングに適した回転数になるように感じます。
この回転数で浮上力の余裕をチェックしながら無理をさせないように最大ピッチを合わせます。
T9Zに送信機を交換し、ホバリング用のアイドルアップモード(エンジンヘリでは私は滅多に使いませんけど)を設定し、スロットル信号設定を90%フラットに合わせピッチとトリムを合わせてみています。
ミキサーへの補助チャンネル入力を送信機のジャイロ感度調整チャンネルから取っていますが、この信号設定でエレベーター操舵時の機体の動きが変わってきます。
あくまでも実際に飛ばして合わせる必要があります。
ピッチング軸の不安定さはあまり感じられません。ゆったりした動きでは制御不能になる事は無いでしょう。その代わりにエルロン方向やラダー方向の動きでシングルローターヘリでは思いも寄らない挙動があります。舵は穏やかな機体ですので手で操縦して制御する必要はあると思います。
ゆっくりした動きの範囲ではホーネットよりも落ち着いています。
ガバナーモードでホバリング用アイドルアップモードを使うとタキシングができるようです。ダウン打って浮かない程度にピッチをかけてやると前進します。ラダーで方向転換も可能です。後退はさせない方が良いでしょう。
随分前に岩国基地で見た米軍海兵隊仕様のCH-46の様に前進滑走しながらピッチを入れて浮上させるとちょっと雰囲気です。
なかなか飛ばして楽しい機体になってきました。
こういうことを延々として、バッテリーが少し暖かい程度でした。今は外気温が非常に低いので夏場のモーター温度は気を付けた方が良いかもしれません。
ただし、この機体は基本的に英文説明書しかついていません。ホーネットなどは図解だけで組めますが、この機体は肝要な注意点がほとんど英文でかかれている所に書いてあります。辞書片手でいいですから納得いくまで説明書を読解されることをお薦めします。
また、この種の機体が好きな方には非常に興味を持たれる機体とは思いますが、エンジンヘリ・電動ヘリ(パワー特性以外大差ないと思いますけど)がしっかり調整できて普通に飛ばせる操縦技量は要求されます。
メカに詳しいし何機も組んだことがあるというだけではかなり遠回りになると思います。ここだけはご留意された方が良いでしょう。
私はホーネットでも同じ事なのですが、小型の可変ピッチ電動ヘリは入門者から中級者の方にはかなりハードルが高い物だと思っています。
ホーネットが飛ばせるから中級者という事はあり得ませんが、小さくて簡単だからという事で安易な取り組みをされる方には間違っても向きません。
本気でとりかからないと確実に高価な飾りになります。(飾ってるだけでも可愛いですけどね)
市販されている大半の樹脂フレームのエンジンヘリは、普通にネジを締める(オーバートルクにならず)だけで80%程度のポテンシャルは発揮するようになっていると思います。その先の20%は組むときの注意力と組む人間の能力の問題になります。
ほんとはこの先の20%が大変なのですが、これは単に金属パーツに変えるとか社外メーカーのパーツに変えるという問題ではありません。
精度向上を目指すのなら高精度な金属パーツに変える事も方法として大切ですが、いい加減な精度で加工された安価な金属パーツで、しかも強度の低い低質な金属ブロックから削り出されたパーツなら、しっかり成型された樹脂の方がよほどまともでしょう。
墜落時に破断面ががさがさに荒れるような材料で作られた物はどうなのかな?と個人的には思います。
確かに金属パーツに組み替えて行くと見た目も良くなりますし、愛着が湧いて機体を大事にしますから良いことなのですけどね。個人の好みの問題だと思います。
私は以前教えてもらった人がヒロボーの機体の達人でしたので、無闇にパーツ交換する事はありませんでした。メーカーの量産で市販機の場合にはいくつかは精度で問題のある箇所もありますが(コストの問題)そこを対策する物以外は交換する事はありませんでした。
私のスカディ50は初期のフレームですのでフレーム底面の補強はしていますが、エボリューションのヘッドに交換した以外はノーマルです。でも煮詰める箇所はまだまだ山ほどあります。
そういう姿勢で扱う方がCH-46の場合は近道かもしれません。
2005/01/23
屋外で調整

 Dr津田氏撮影 感謝
Dr津田氏撮影 感謝
知人と飛ばしに行く機会があり、少し風がありましたが屋外での調整を始めました。
別にこの機体でループをしようとか上空を全速力で走らせようというわけではありませんので、ローター回転数も適当な値で合っているようでした。
駐車場でのほぼ無風でのテストと異なり、風にはやや影響されます。通常のホバリングと静演技レベルでの方向転換は問題無かったのですが、後ローターのピッチが少なかったのか、前ローターのスワッシュの前傾が少なかったのか向かい風で頭を上げてしまい小破してしまいました。
ジャイロの動作自体には問題はありませんでしたので、ホバリング時の中立設定を煮詰めていけば解決しそうです。
非常にゆったりした飛びで落ち着きのあるものでした。雰囲気はなかなか良い様です。
修理の際に胴体上部のドライブシャフトカバーを破損のためバルサにオラライト仕上げの似たような形のものに作り直しました。
風の強いときは避けた方が良いかもしれませんね。
2005/02/12
ESC設定し直し
受信機を双葉のR146iPに交換しましたが、何故かエルロン信号にノイズを拾うため受信機はBergの6chタイプ3に変更(ホーネットで使っていたもの)しました。
これまでフェニックス25のガバナーモードで調整をしていましたが、AXIの様な極数の多いアウトランナーではガバナーでの設定で回転数を上げる事が難しいという事で、ノーマルモードでの設定に変更しました。
ガバナーモードでもゆったりした回転で浮き上がるのはけっこう良い雰囲気でしたが、回転数の不足は仕方ない部分でした。
ホバリング時で80%程度のごく普通のスロットルカーブの設定ですが、ノーマルモードでは非常に快調に飛びます。
回転の上昇に無理が無く、ホーネットの標準設定?と大差ない回転が維持できれば操舵の反応も素直でピッチ操作の反応も良くなった影響で、ピッチング軸制御の前後ピッチ動作の反応も良くなりました。
風にはちょっと弱そうな感じですが、操舵感は普通になりました。上昇力と安定性も向上。
タキシングはダウン打ったままパワーを入れれば走ります。ラダー操作はダウンを入れたままなら在る程度制御できます。前輪がキャスターになっていればもっと自由になりますが、そこまでは必要ないでしょう。
飛行中のモーター回転数が上がったためモーターやバッテリーの発熱は下がりました。
結局ノーマルモードで良かったようです。回転の上昇も自然になりました。
ピッチング軸のジャイロは今はノーマルモードで設定しています。急な頭上げや頭下げを抑えられればヘディングロックモードまで必要ないかもしれませんが、状況に応じて調整していく必要がありそうです。
2005/02/19
少し手直し
サーボを双葉の3108に載せ替えてみようと思いましたが取り付けピッチが違い、ウェイポイント060のままで続行する事にしました。
送信機の変更で設定に少し手間取りましたが調整終了。
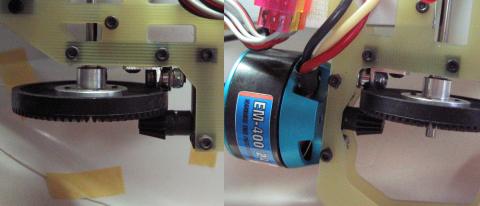
メンテナンスでボディを外したついでにメインギヤのカウンターローラーを追加してみました。純正で問題は無いと思いますがフライト中や着陸後まれに前後ローターの位相がベベルギヤの歯飛びによって起こり前後のブレードが接触することがありました。
これに付随してベベルが破損することも数度あったのですが、良く見てみると大きな力が加わった時にメインギヤが上方に逃げている事がわかりました。
このためギヤのベベルピニオンとかみ合う部分の上側をベアリングで押さえる物を試しに製作し装着テストを行いました。
これまで通常の負荷でも多少のギヤの逃げはあったのですが、これが解消され駆動ロスが少し減ったような感じで回転します。
ギヤの逃げが無いことで転倒時のギヤへのダメージは大きくなりますが、ドライブシャフトが少したわみますので多少は衝撃を吸収するようです。それよりも前後ブレードの位相が狂い接触してしまう事を防止することが優先します。
ギヤとのクリアランスが外径6ミリベアリングぎりぎり程度しかありませんので、ナットの一面を削るとかビスの頭を一部削るなどの加工は必要です。
送信機の変更に伴い、ミキシングボックスの5chラインへの信号をモード(ホバリング・アイドルアップ1・アイドルアップ2)ごとにプログラムミキシングでオフセットをかける様に変更しました。
ミキサーの説明書に少し書かれていますが、この信号でピッチング(エレベーター)操舵時の前後ピッチの変化を変えます。
ホバリング(ノーマル)モードでは通常エレベーターダウンでスワッシュは前後とも前傾し前ローターのピッチが減り後ローターのピッチが増えるようにしますが、ある程度の速度のある前進飛行ではダウンを打った時に前ローターのピッチが減りすぎると急激な頭下げを起こします。特に前ローターの回転面が水平より前傾した場合は注意が必要です。これを防止するため上空モード(アイドルアップ1)時には5CHのオフセットをノーマルモードと換えダウン操舵時の前ローターのピッチの下がりを抑えます。
MSのシステム以外の機体では上空モードでのエレベーターダウンの舵角を抑えることで対応することがあったようですが、MSのシステムの方が調整は楽かもしれません。
テスト時には風が回っていましたがエレベーターの反応も安定性も問題ありませんでした。
徐々に上空モードを合わせて行こうと思います。
2006/02/18
エレベーターミキサーの調整をあれこれやり、-84%程度で落ち着いています。微風でしたが地表近くの乱流で姿勢を乱される事がありましたが、制御可能でした。
バッテリーをポリクエストの旧タイプ1500からサンダーパワーの2100の3セルに変更しました。
重量増加の影響は無く、バッテリーの形状違いによる重心移動も悪影響は無く、むしろ重心位置が少し前に出ることで頭上げの癖が減少したように感じました。
ギヤのカウンターローラー追加で急操舵時の歯飛びは解消しました。逃げが無くなった事で飛行中の回転音も安定しています。
穏やかな前進飛行ではヨー軸の変な癖は出ません。MSの室内デモフライト程度の飛行にはなったようです。
エレベーターだけ癖が強いですが、他はどっしりとした感じで安定して浮きます。
2006/02/25
ESC変更
阿蘇でのフライトの際、ノイズの影響かサーボの誤動作が起こり帰宅後に全体の見直しを行いました。
サーボの誤動作はアンプやミキサーの原因では無く、ヨー軸に使っていたGWSの古いジャイロの誤動作でした。手持ちにPixyZAPから外したRCmartの可変感度タイプがありましたので、とりあえずこれで(受信機が6chのため感度はジャイロ側で調整)テストしたところ誤動作は解決しました。
JETIのスピンシリーズはBECにスイッチングレギュレーターを使っています。従来の外付けスイッチングレギュレーターの中にはノイズによる誤動作を招く物がかなり多くノイズ対策に悩む物が多かった様ですが、JETIの物はノイズフィルターを入れた方が良い様ではありますが、4セル以上を常用する大型電動ヘリで評判は良いようです。
構造はシンプルな方が良いので今回このJETIのスピン33に変更してみました。これによりS-BECは使わなくて済みます。供給電圧も5Vから5.5Vになりました。
コントローラーから受信機へのケーブルには念のためフィルターを入れています。
またミキサーから前スワッシュのサーボへのケーブルがモーターのローターに少し近かったためボディに当たらない範囲で極力モーターから離しています。これはケーブルの真横をマグネットが高速で回転してますのでノイズ入らない方がおかしいとも言えます。
舵が効かなかったのかノイズで誤動作していたのか、まだ完全には不明ですが舵が気持ち程度良く入る様になったようです。
JETIのスピン33にはアウトランナー用の設定があり、私はこの機体ではガバナーモードは使いませんので(説明書には多機能なガバナーモードが説明ありましたが、送信機のスロットルホールド機能でモーターの回転のオンオフを操作する方法では、各モードでのローター回転数の設定に少し無理があるような気がします。またこのガバナーは回転数が安定するまで少し時間を必要とする様なので、たとえばホバリングモードで浮上し微速前進から上昇しつつアイドルアップ1へ入れて回転を上げるという飛ばし方には向きません。3Dしかしない、すべての演技は3Dモードでの回転数で行うというのなら話は別ですが、在る程度割り切った使い方が必要なのかもしれません。ホバリングモードを同じ設定で2つ作り、片方のモードでモーター起動から浮上前のホバリング回転維持まで上げた後にもう一つのフラットな設定のホバリングモードに変更して離陸という方が感覚的に理解しやすいかもしれません。
リトルベランカさんが同封して下さっている説明書にはオリジナルの説明書以上の事は書いてありませんが「すなわち」を多用しすぎ、肝心な解説が抜けているのはいかがなものかとは思います。電動ヘリ専門店ではないので仕方ないとは思いますが、もう少し柔軟性があってもいいのかもしれません。
それはさておき、スピン33のアウトランナー用設定にするとフェニックス25での設定より回転が上がるようになりました。これで再度調整したのですが、ホバリング回転は若干高めの方がピッチ軸の制御が楽になります。タンデムヘリですのでよほどでたらめな事をしない限り極めて低速回転でも浮いてしまいますが、風の在る場所で飛ばすと頭を上げたときに抑えが効かなくなります。これはミキサーへの信号やピッチ軸ジャイロの設定で在る程度はカバーできますが、舵は効いた方が良いと思います。
今のところホバリングモードではミキサーへの信号をオフセットでプラス85%(エレベーターダウンで前後スワッシュが前傾、前ローターのピッチが大きく下がり後ローターのピッチが大きく上がる)にしています。アイドルアップ1(穏やかな上空モード)はオフセットミキシングを換えスワッシュの傾斜主体で前後のピッチ変化を小さくしています。前進飛行中の急激な頭下げを予防する意味でしていますが、まだ安全高度内で切り替えて様子を見ています。
前進速度が低い場合は大きな頭上げからはスワッシュの傾斜だけでは復帰できません。前後のピッチ差で制御しなければ舵は入りませんし、ローター回転が低いと浮力差が小さく舵は入りづらくなります。(風などでこういう事にならない場合は、前進速度が上がりすぎない様にすればホバリングモードで普通にうろうろできます)
ピッチ軸のジャイロには今のところGY240を使っています。ヘディングロック(AVCSモード)は現在使っていません。調整中に試しにヘディングロックで実験しましたが、エレベーターの操舵感に違和感が残ります。アイドルアップでの上空巡航ではメリットがありそう(急激な頭上げや頭下げでの修正遅れの防止)に思えますが、飛行中に操舵感が変わってしまうのはちょっと難しくなります。
ヨー軸はノーマルジャイロを使っていますが、ゆっくりとした場週飛行では問題ありませんが、高速前進巡航中に機首振りを起こした場合(タンデムの固有癖ですが)を思うとヨー軸にヘディングロックジャイロを使うのは良い事かもしれません。(ぎりぎりまで感度上げるわけではないのでGY240で十分です)シングルローターでは予測もできない様な機首振りを起こしますのでジャイロに頼ってしまうのは有意義です。
今回の改修時にPCM受信機をもう一度テストしてみましたが、多少改善されましたがやはり周期的な誤動作が起きてしまいます。受信機とミキサーの相性かもしれません。
ミキサーからのケーブルに地道にノイズ対策をすればいいとも思えますが、信頼性の高いFM受信機で十分にも思えます。ジャイロの感度調整をリモートでやろうと思うと6ch受信機では不足しますが、これも今後の課題です。
ちなみに基本設定の問題ですが、正規にリンケージしたうえで前後のスワッシュはマストに対して垂直でなければなりません。ホバリング時のピッチ軸の補正は送信機のエレベータートリムは極力(意地でも)触らず、前後ピッチの調整で行う必要があります。(スワッシュの傾斜で補正するとホバリング時の前後ブレードの回転面が正規の角度になりません。前後のマストのオフセットの効果が失われます)
2006/11/16
ラダー用のジャイロをGY240に交換しテストしてみました。AVCSモードは基本的にシングルローターのヘリのテールに合わせてセッティングしてあるためタンデムヘリには少し向かない部分があるようでした。ノーマルモードではGY240の基本性能のおかげで安定したフライトとなるため、当分これで飛ばす事にします。
ミキサーから受信機へのケーブルにノイズが入るためPCM受信機との相性が悪いのかとフィルターやケーブルの取り回しを再度あれこれやってみました。ミキサーからエルロンへの3本ケーブルに双葉のノイズフィルターを経由させたところ、周期的な誤動作は解消しましたが、ラダー・エレベーターへはジャイロを経由しているせいかそのままではやはり誤動作が起きます。
(ピッチは正常に動作)プラスマイナス両方のケーブルならノイズフィルターを入れて解決できそうですが、現状では少し難しいです。
受信機は素直に信頼できるFM受信機を使う方が無難な様です。
スピン33のガバナーモード(非3D用)を試してみましたが、離陸前の回転が上がりすぎ、なおかつホバリングから上の回転維持が厳しくなるようです。アウトランナーモーターをあまり回転を上げないで使う設定の機体ですので相性の問題と思われます。
感覚的にはノーマルモードで各コンディション毎にスロットルカーブで合わせていく方がスケール機の場合には自然に思えます。
2006/11/18
ESC交換後にポリクエストの1800mahバッテリーでテストしていましたが、劣化を感じハイペリオンの1800mahを導入して調整しています。
スピン33に交換し(アウトランナー飛行機モード)少し回転が上がるようになったため、スロットルとピッチの設定を少し変更しだいたい良い感じになってきています。
タンデムですので変なピッチでも良く浮きはしますが、回転が少なければ舵が効きませんし前後のピッチ変化によるピッチングの制御が緩くなってしまいます。
やはり少し回してやった方が操縦性は良くなる様です。
舵が入り始めるとシングルローターと比較した時の違和感は減ってきました。屋外の風の強い場所ではテストしていませんが、微風程度なら問題なくコントロール出来る様になっています。
ラダー軸ジャイロのヘディングロックは未練がありますが、テールピッチ制御ではなく、前後の回転面の傾斜ではタイムラグがどうしても出るため、もうすこしあれこれやってみる必要はありそうです。GY240に換えジャイロの能力は格段に向上していますので、今の段階でも変な挙動はでていませんのでこのままでもいいのかもしれません。
屋外で緩いアイドルアップを使った上空モードの調整をぽちぽちと進めてみることにします。
現段階で微風程度なら問題ない操縦性が確保できました。
2006/11/22
微風の屋外でテストをしてきました。JETIのコントローラーに交換して回転がより上がるようになりました。まだ風によってラダー方向に変な癖が出ますが、ジャイロで少しは抑えられますので制御に問題は無いと思います。暴れないように丁寧に操作してやれば、ゆったりとした動きでは問題は出ません。
前進速度がある程度上がった状態から、急激に頭上げで減速させようとすると機首が上がりすぎる事があるため、徐々に減速させる必要はあります。ローターの回転数を高めに維持し(低回転でも浮いてしまいますが)舵の入りを保っておけば向かい風での機首上げからも少しタイムラグは出ますが舵は効きます。
この機体の場合は前進時の機首下げよりも、減速時の機首上げ過ぎに注意が必用な様です。
ローターの回転面制御によるラダー動作ですので、通常のジャイロのヘディングロックモードでは素直にはうまく行かない事があるようです。テールピッチコントロールほど敏感な反応は期待できませんので、これは機体の特性として慣れていかねばならない部分なのかもしれません。
2006/12/25